Category: Software
-
Going Wireless. Again.
One of the good things about a hobby project is that you design and build stuff and the let it wait for a couple of weeks because you have other things to do. Why is that good? Because you’re the first user that will need documentation when diving back into your stuff. I decided to…
-
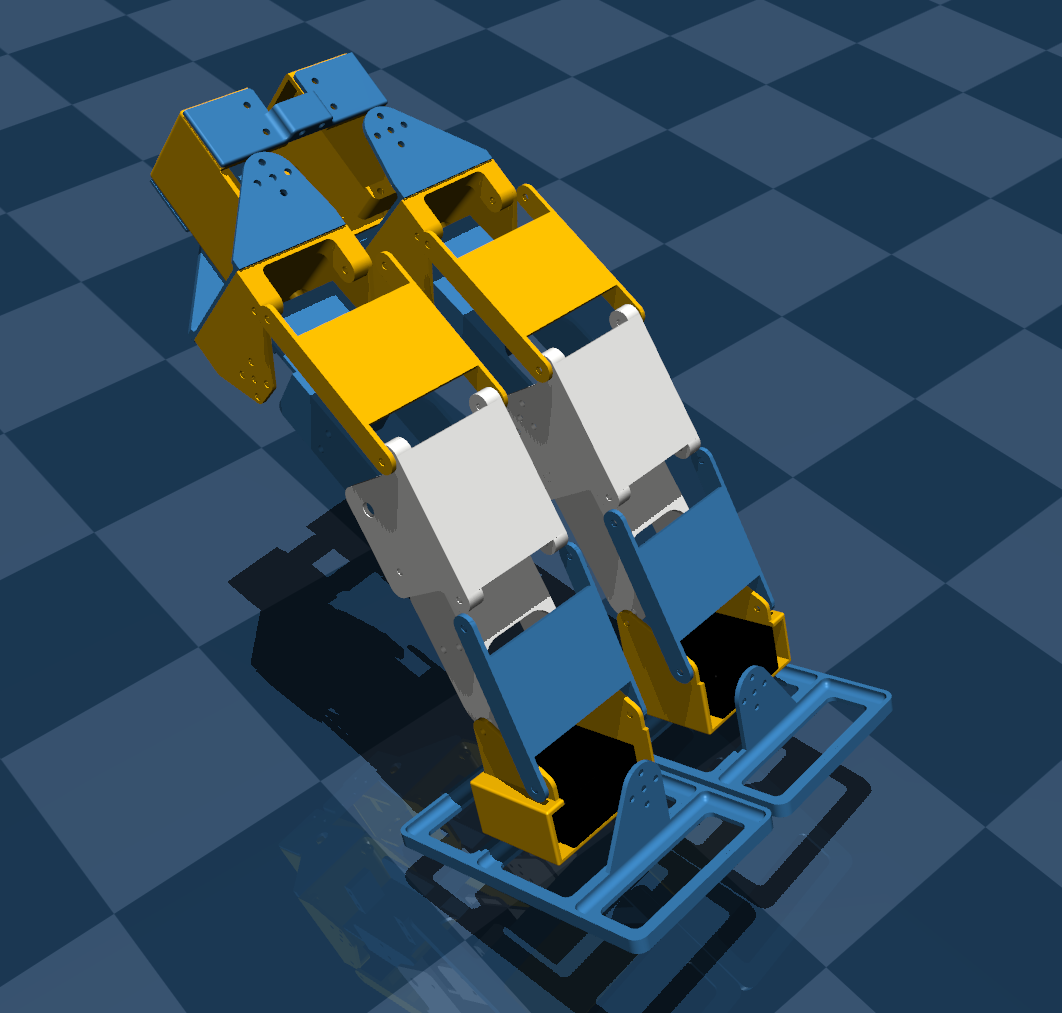
MuJoCo, simulating Kayra
I was checking out the simulation options, pyBullet is nice and close to Python but it’s really a physics framework. MuJoCo was designed from ground up with simulating robots in mind. pyBullet is reading URDF files that are XML files defining how the single elements relate to each other as well as how joints and…
-
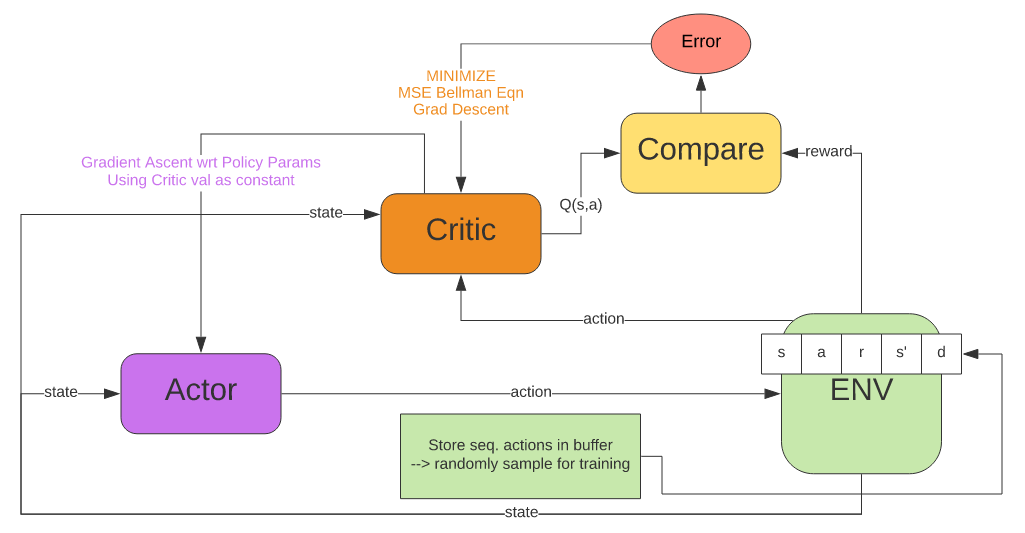
Learning to walk by Deep Reinforcement Learning
I just came across a really inspiring project that is very close to Kayra, where a fellow roboticist tried to transfer a learned walking pattern acquired through simulating a real robot (Plen in this case): We will also use PyTorch for all Machine Learning on the host, which fits the bill and the chap also…
-
Kayra Full Body Walk!
So, finally, all parts in place to let Kayra walk with a rubber sole and the whole body inkluding chest, arms and battery. This is a major change from the initial walk since there is a lot more mass to be moved on the top of the robot and the rubber soles lead to a…
-
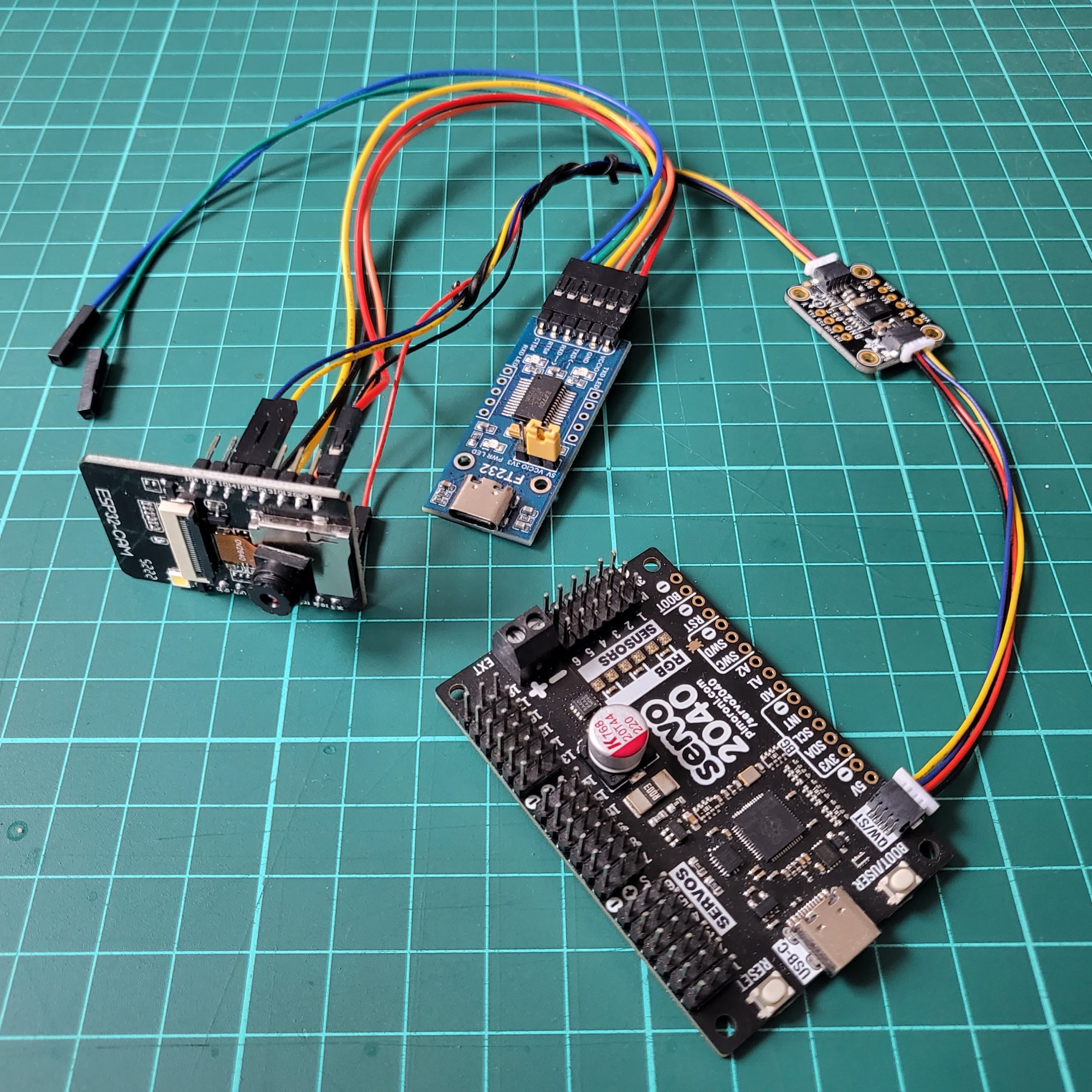
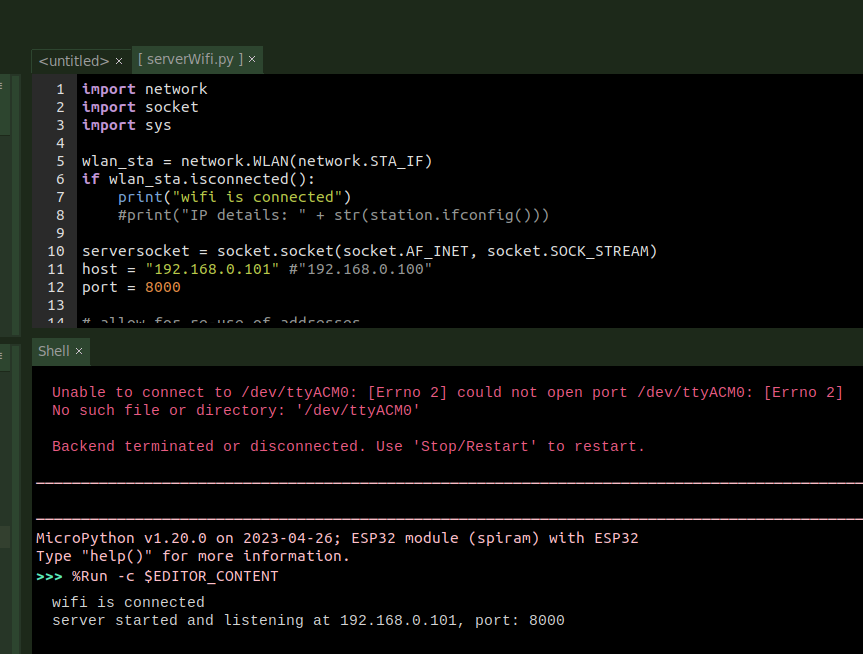
ESP32 Cam, IMU and Servo 2040 connected
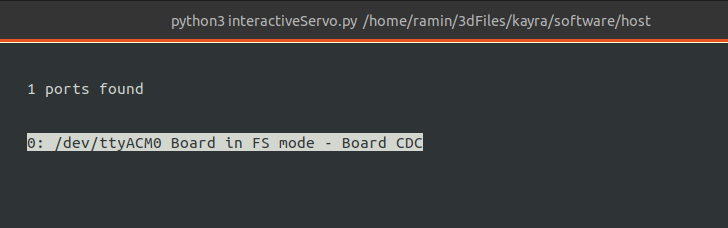
For Kayra, it’s necessary to go untethered. This video shows the fist successful connection from PC to ESP32 Cam (running in Micropython) via Wifi to IMU (BNO055, I2C slave) to the Raspberry Pi Pico based Pimoroni 2040 Servo Controller (as I2C slave). I enter a number on the PC transmitted via Wifi to the ESP32…
-
Simulating Kayra
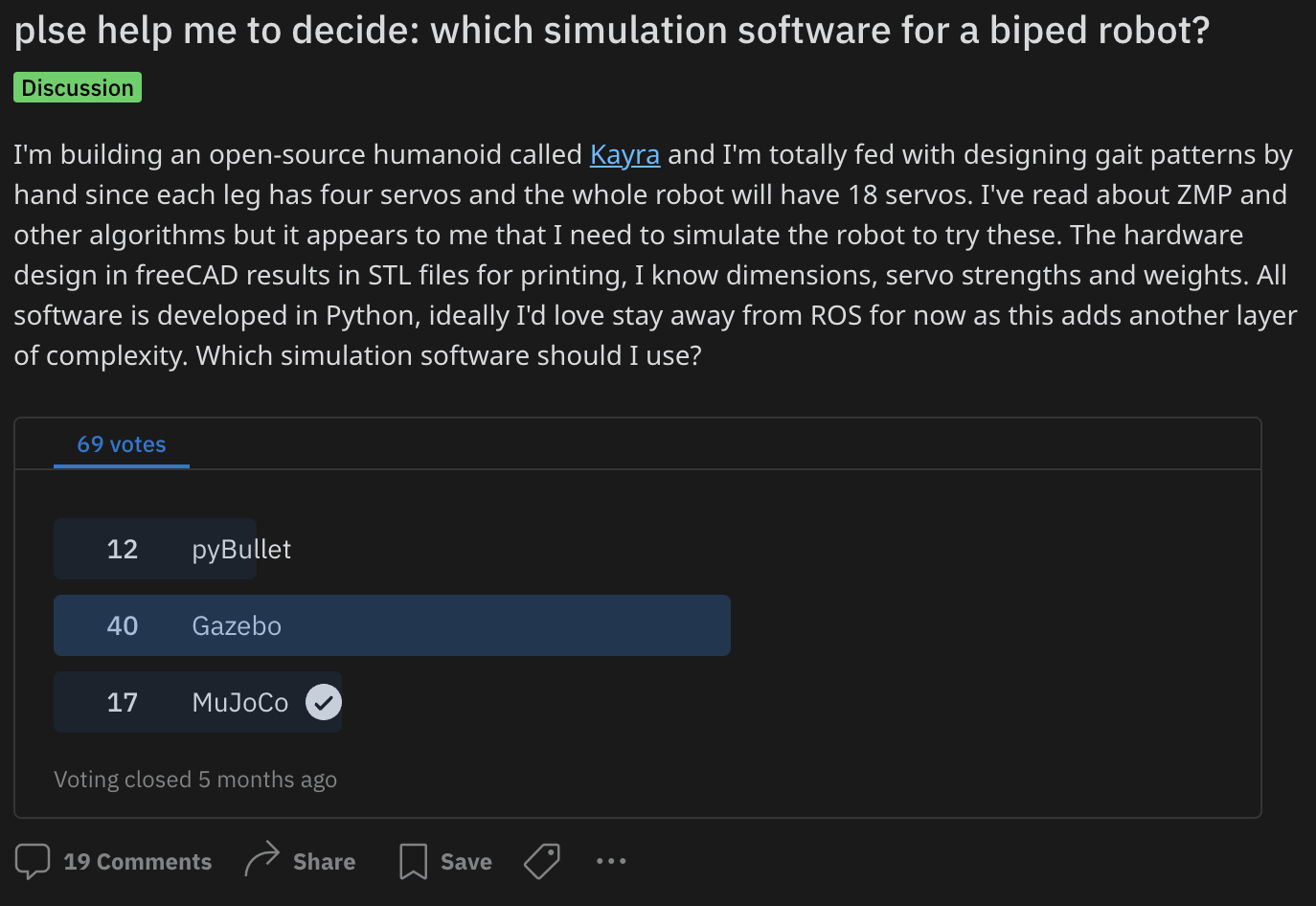
At some point in time, it will be necessary to work with a digital twin of Kayra to simulate all sorts of movements, weight distribution and possibly power. Also during the design process it would speed up the fitting of two parts. I asked the reddit community about which software to use: pyBullet is a…
-
Kayra’s very first walk!
That was a lot of work to understand the initial poses and the animation needed, but here it is! Of course, there is a lot to improve, especially the feet are slipping on the plastic mat. But what’s really cool is that the steps are really long, so it’s not the conventional half-foot steps that…
-
Kayra’s Controller Software
I assume that you have cloned / downloaded the Kayra’s github archive that contains all 3D files and software. In the software directory, you will find the directories /host and /robot. The former is for the PC (Linux) and the latter is for the robot. Within /robot, you’ll find /body, /head, /sensors and /tools You…
-
Setting up the Controller and Thonny
Introduction Kayra will start with the Pimoroni Servo Controller because this controller is based on the Raspberry Pi Pico 2040 chip running Micropython. The intention was to keep the complexity of the programming languages for Kayra low. Ideally, hobbyists and students only need the knowledge of Python and can work on all levels with Kayra: …