I just came across a really inspiring project that is very close to Kayra, where a fellow roboticist tried to transfer a learned walking pattern acquired through simulating a real robot (Plen in this case):
We will also use PyTorch for all Machine Learning on the host, which fits the bill and the chap also tried simulations on PyBullet and Gazebo, which I also evaluated.
In contrast to the community on reddit he finally opted for PyBullet simulation whereas the community voted for Gazebo when I asked.
I’m far from understanding the Reinforcement Learning algorithms used there but it would be a great first step to get Kayra’s STL files either into PyBullet or Gazebo.
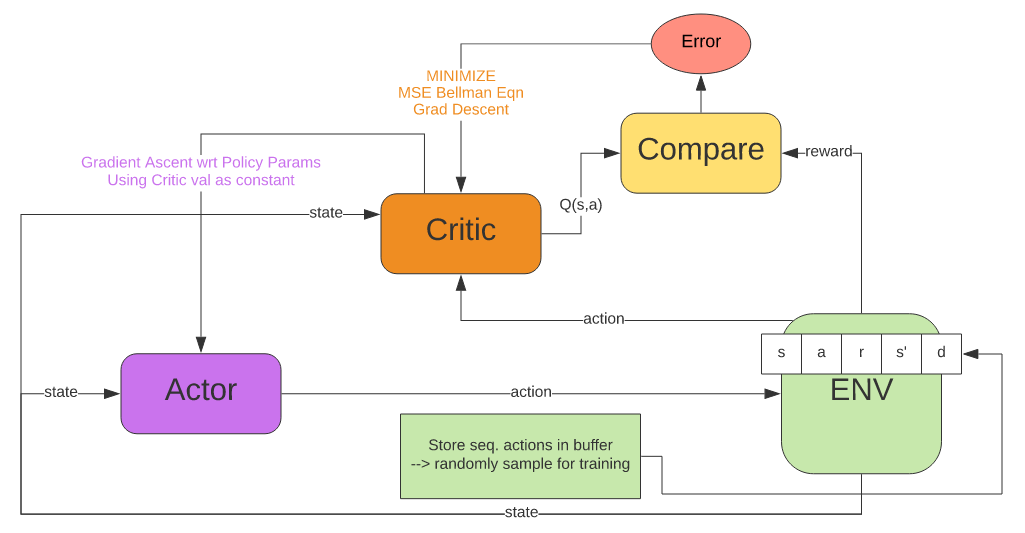
(image courtesy of Maurice Rahme)
Leave a Reply