I assume that you have cloned / downloaded the Kayra’s github archive that contains all 3D files and software. In the software directory, you will find the directories /host and /robot. The former is for the PC (Linux) and the latter is for the robot. Within /robot, you’ll find /body, /head, /sensors and /tools
You should start the /host/interactiveServo.py on the host using python3 interactiveServo.py, it will show that there is no controller connected to the PC.
Next, put the /robot/body/usbServos.py (controlling 16 servos) or usbServosCluster.py (all 18 servos) on the pimoroni Servo Controller and start it there.
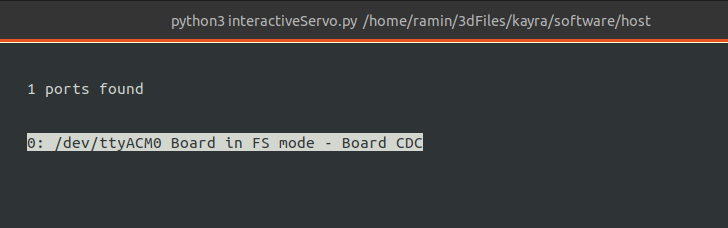
Next, you connect your host with the controller via USB-C and you should see the serial port of your Linux machine showing the servo controller board:
Pressing Enter will connect, pressing “p” will get you into “pose” mode where you can modify the single servos. It starts with the “neutral” pose where you should put Kayra into a straight up standing pose. Hit “s” for saving the data to the hard drive, it will be loaded automatically next time you start on the PC.
See here for a tutorial:
Leave a Reply