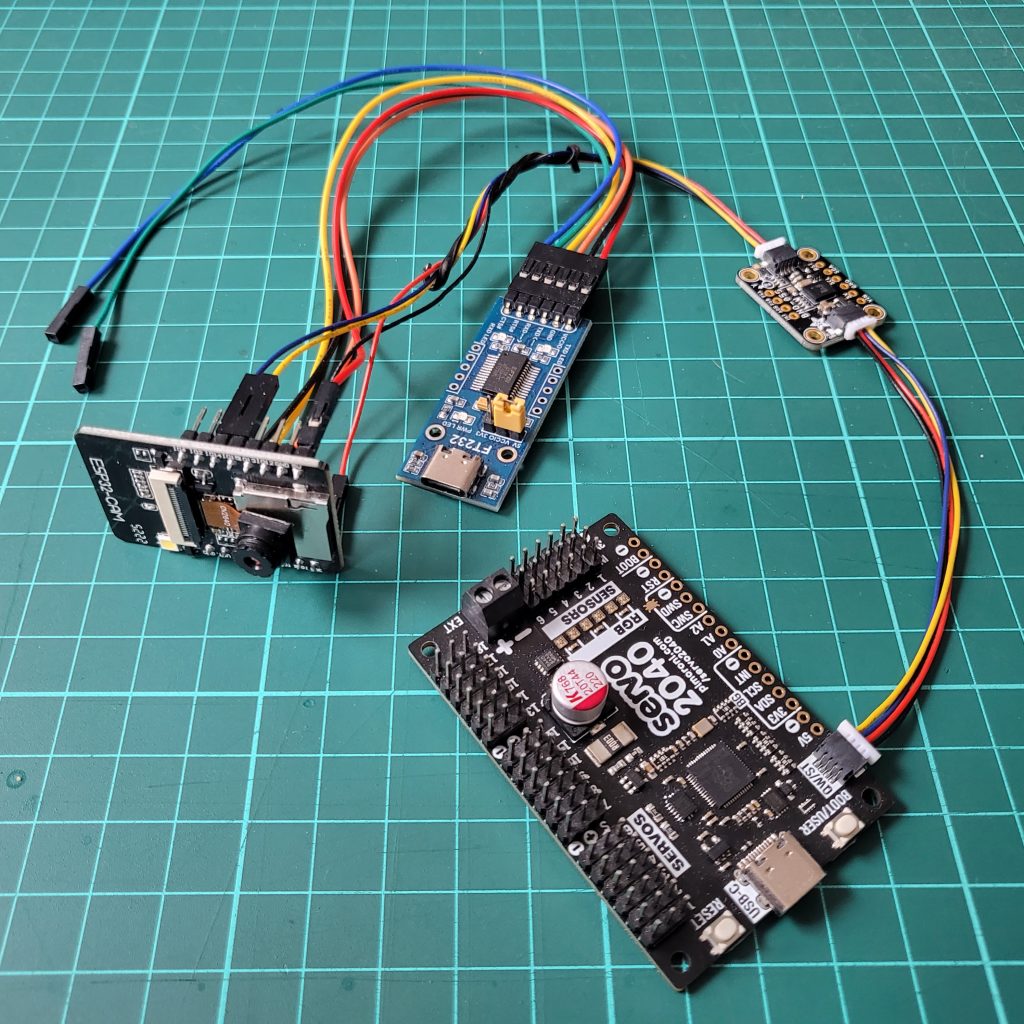
For Kayra, it’s necessary to go untethered. This video shows the fist successful connection from PC to ESP32 Cam (running in Micropython) via Wifi to IMU (BNO055, I2C slave) to the Raspberry Pi Pico based Pimoroni 2040 Servo Controller (as I2C slave). I enter a number on the PC transmitted via Wifi to the ESP32 Cam which then sends it via I2C to the servo controller that blinks that number of times.
We’re using the codes:
- clientWifi.py on the host (kayra/software/host)
- serverWiFi.py on the ESP32 (kayra/software/robot/head/tools)
- i2cListener.py on the 2040 (kayra/software/robot/body)
Leave a Reply