Author: ramin
-
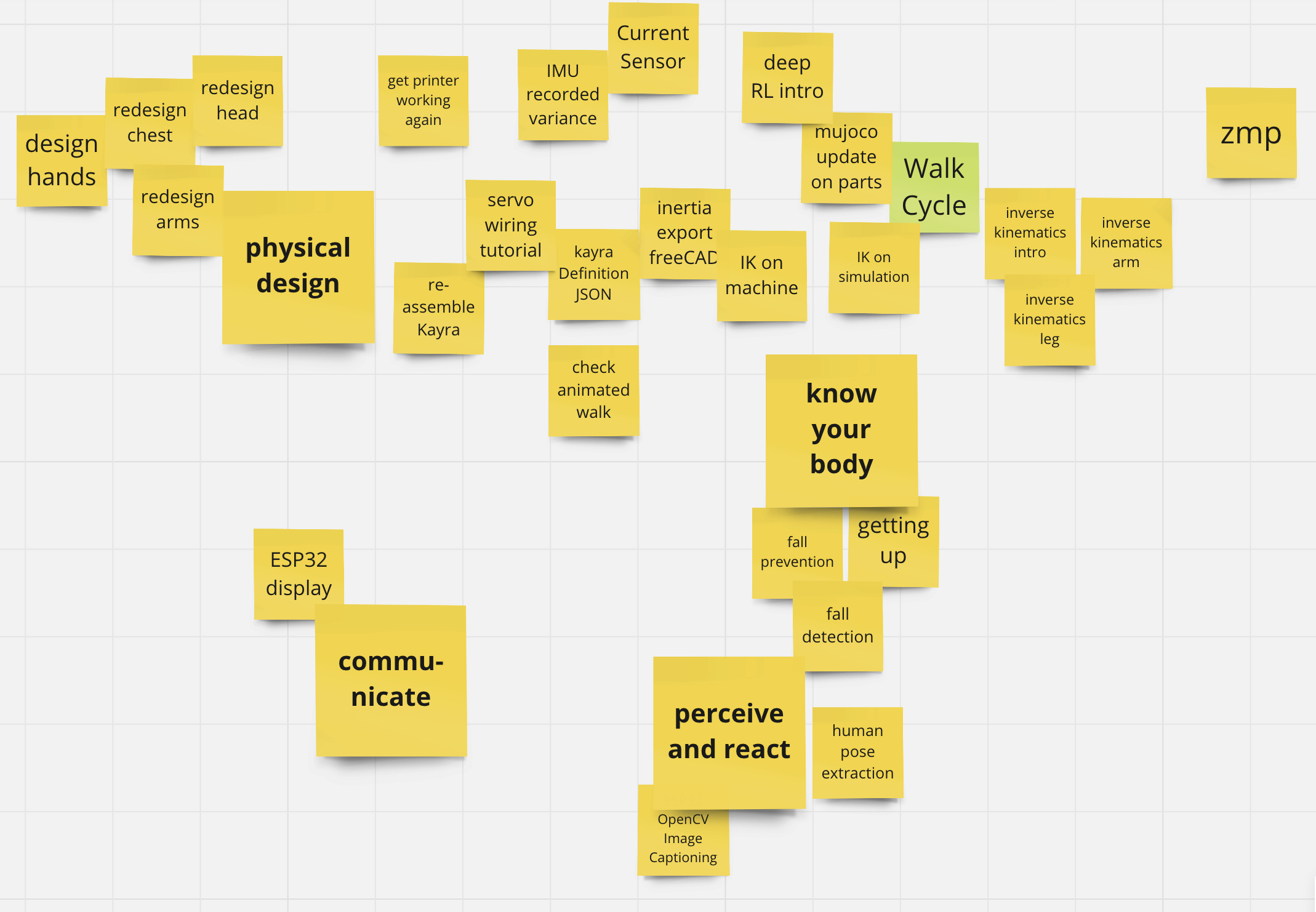
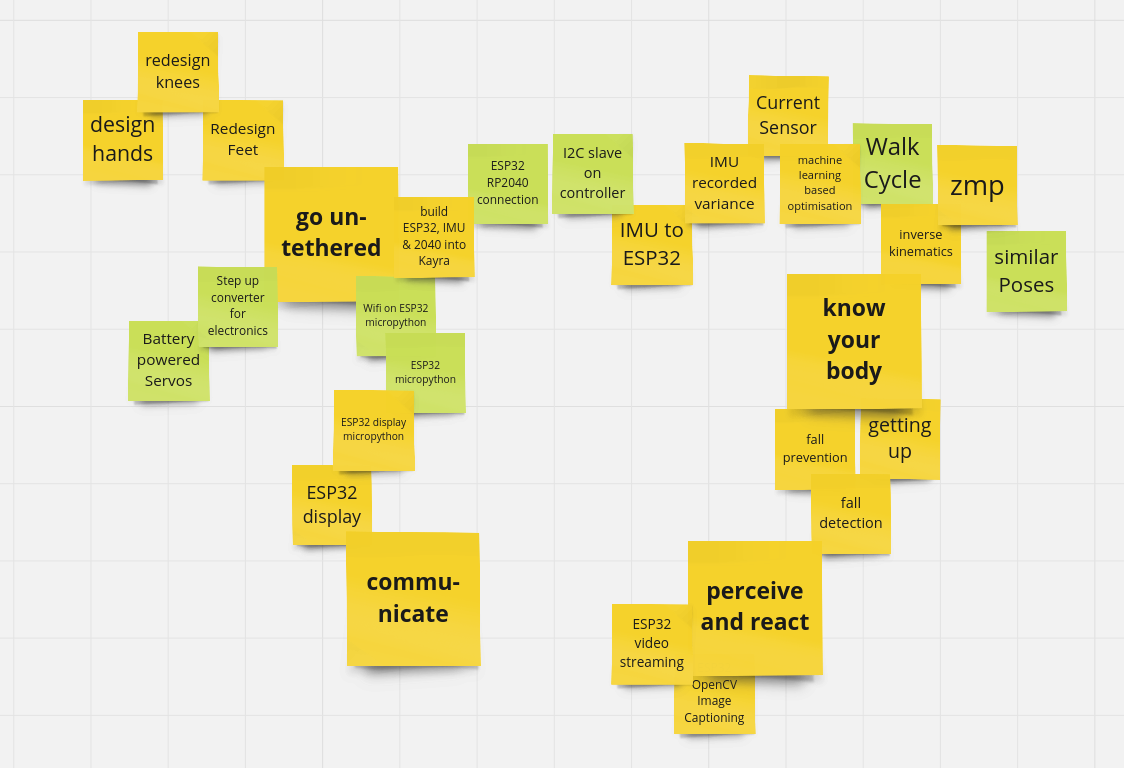
Roadmap 4th Jan 2024
Okay, a lot happened since the last roadmap review, let’s check out what’s been done (turned green): There have been investments along the power management (battery & step down converter), making Kayra wireless (all the ESP investements), let her display and stream video (firmwares on github), finally, there was a new walk cycle to let…
-
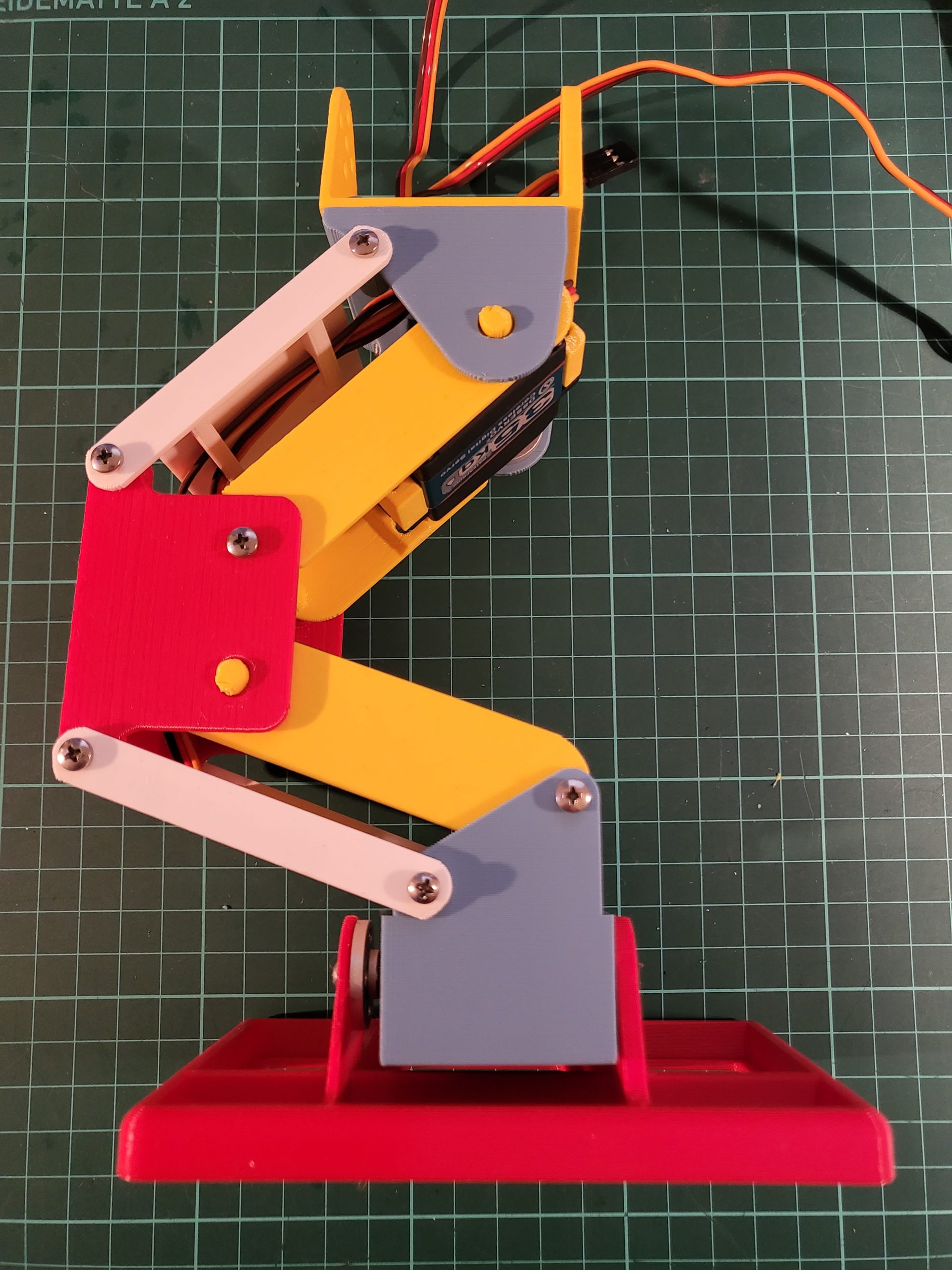
Leg assembly video tutorial
I’ve recorded a tutorial how to assemble Kayra’s left leg from the printed parts, four servos, two bearings and a couple of screws. Here’s the instructions / timings from the YouTube video, you see that we can assemble a leg within 20min! Note that the printed parts STLs are named bottom up (from foot to…
-
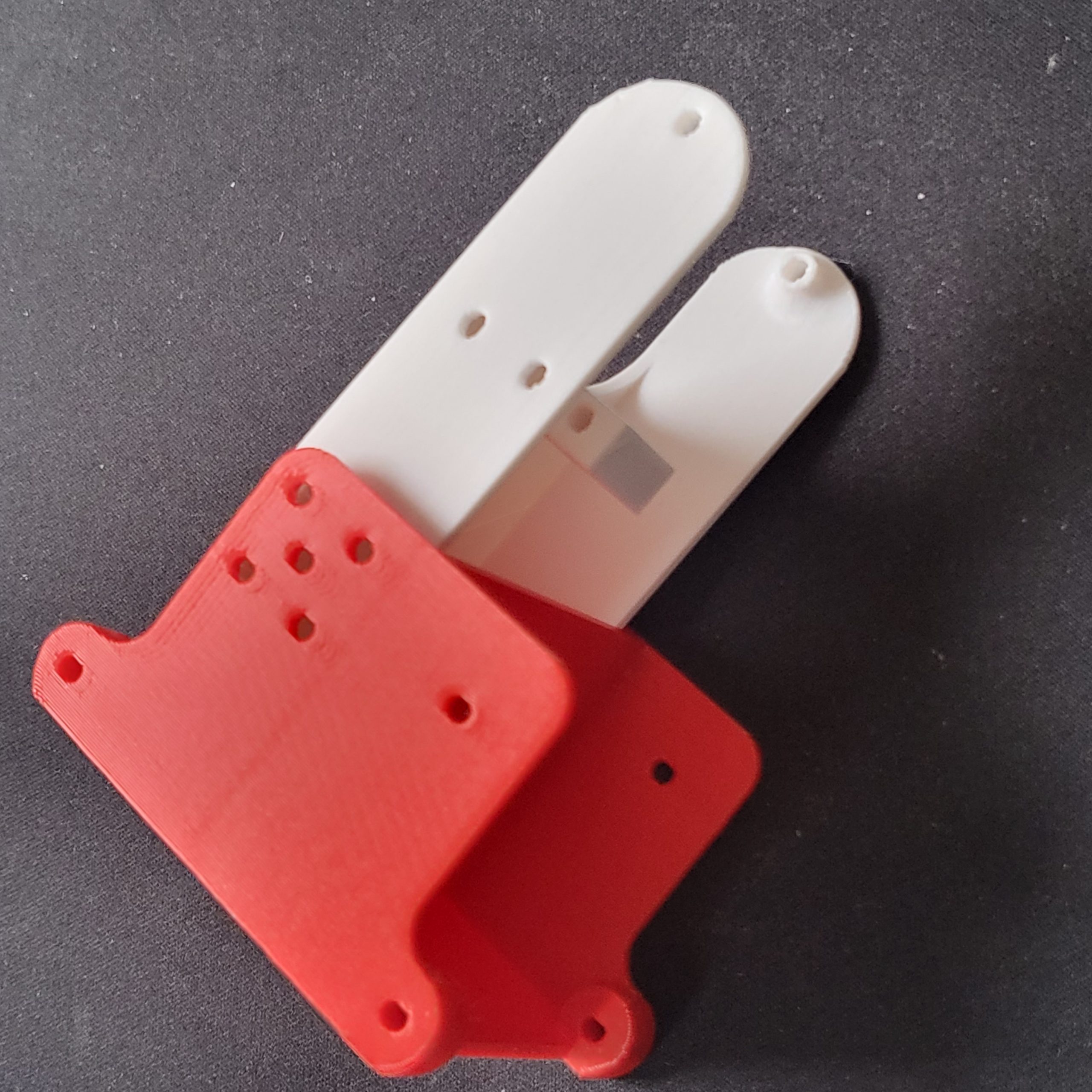
Knee Design Evolution
Usually I’m designing from a “geometric requirements first” perspective to understand the relation of parts first, next I want to get the attachments stable so that screws etc really sit tight and won’t wobble. Finally, there’s the overall-system perspective: does the part in conjunction with the others and while the robot is moving the right…
-
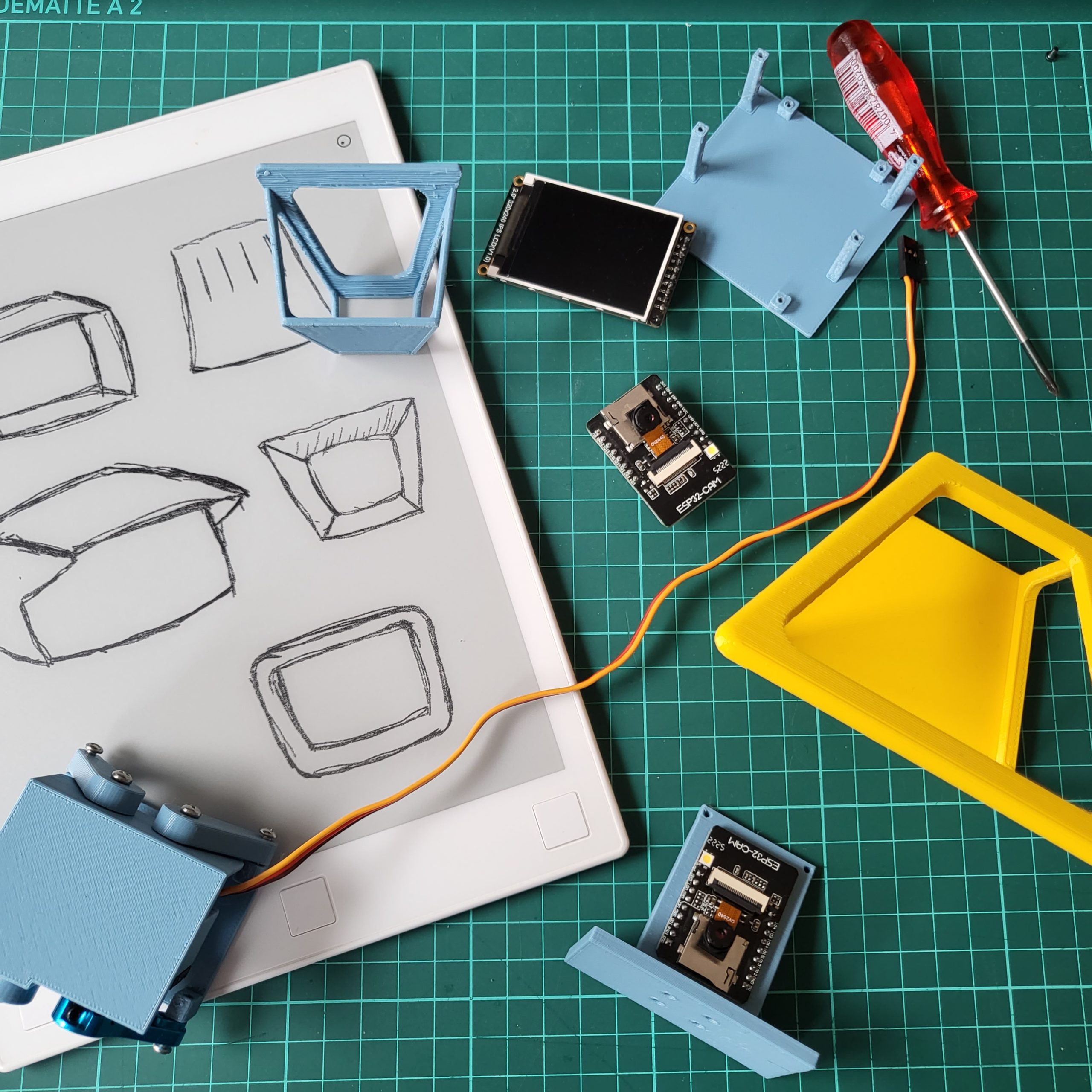
Going Wireless. Again.
One of the good things about a hobby project is that you design and build stuff and the let it wait for a couple of weeks because you have other things to do. Why is that good? Because you’re the first user that will need documentation when diving back into your stuff. I decided to…
-
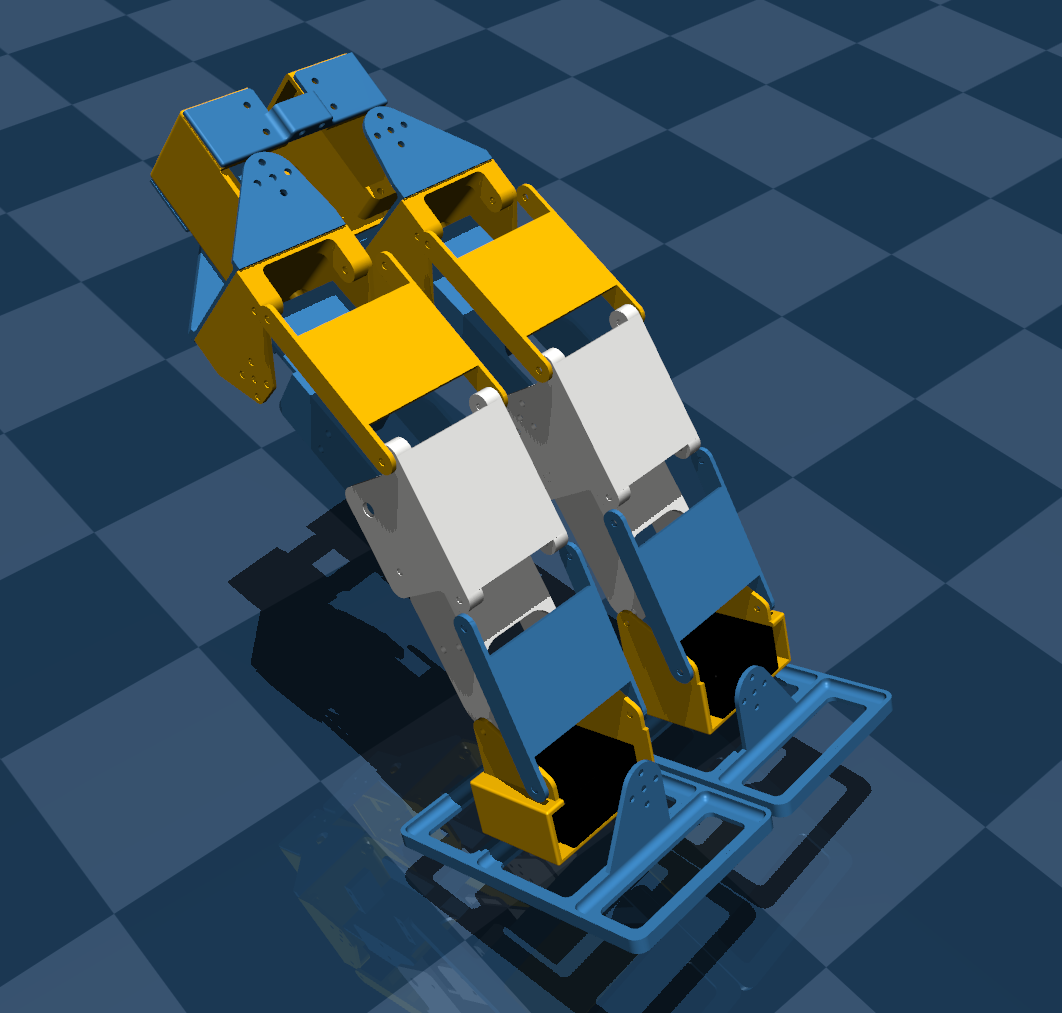
MuJoCo, simulating Kayra
I was checking out the simulation options, pyBullet is nice and close to Python but it’s really a physics framework. MuJoCo was designed from ground up with simulating robots in mind. pyBullet is reading URDF files that are XML files defining how the single elements relate to each other as well as how joints and…
-
Design Review of Kayra’s Head
I decided to do video reviews from time to time to document the thinking about how to design parts, understand their spatial relationships, the possibilities to print and assemble them, accessability for electronics and certainly the looks. So, here’s the first review. It’s about the neck mechanics, the electronics holder in the head and the…
-
Roadmap July 25th 23
Tasks done in green. Kayra has her servos and servo controller powered by battery.
-
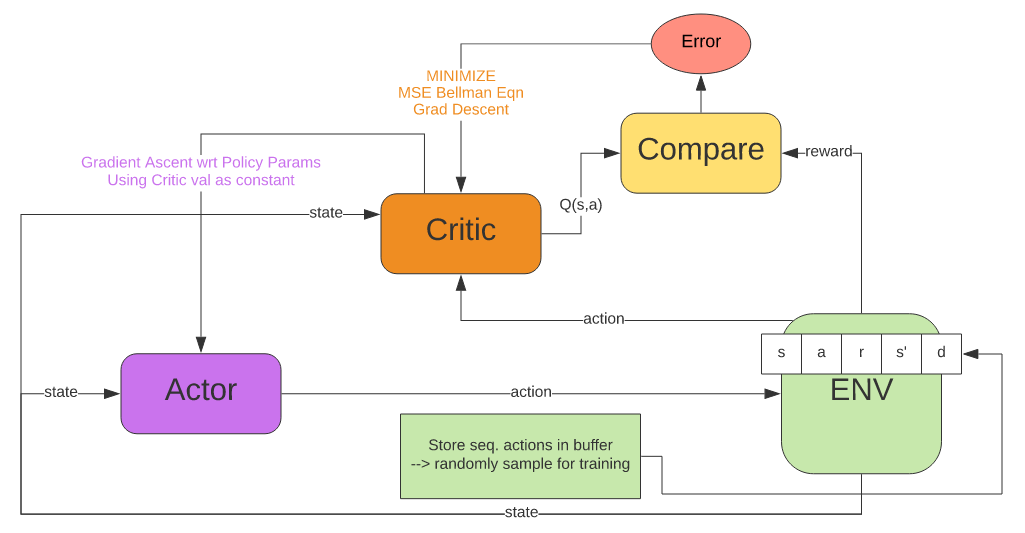
Learning to walk by Deep Reinforcement Learning
I just came across a really inspiring project that is very close to Kayra, where a fellow roboticist tried to transfer a learned walking pattern acquired through simulating a real robot (Plen in this case): We will also use PyTorch for all Machine Learning on the host, which fits the bill and the chap also…
-
Kayra Full Body Walk!
So, finally, all parts in place to let Kayra walk with a rubber sole and the whole body inkluding chest, arms and battery. This is a major change from the initial walk since there is a lot more mass to be moved on the top of the robot and the rubber soles lead to a…
-
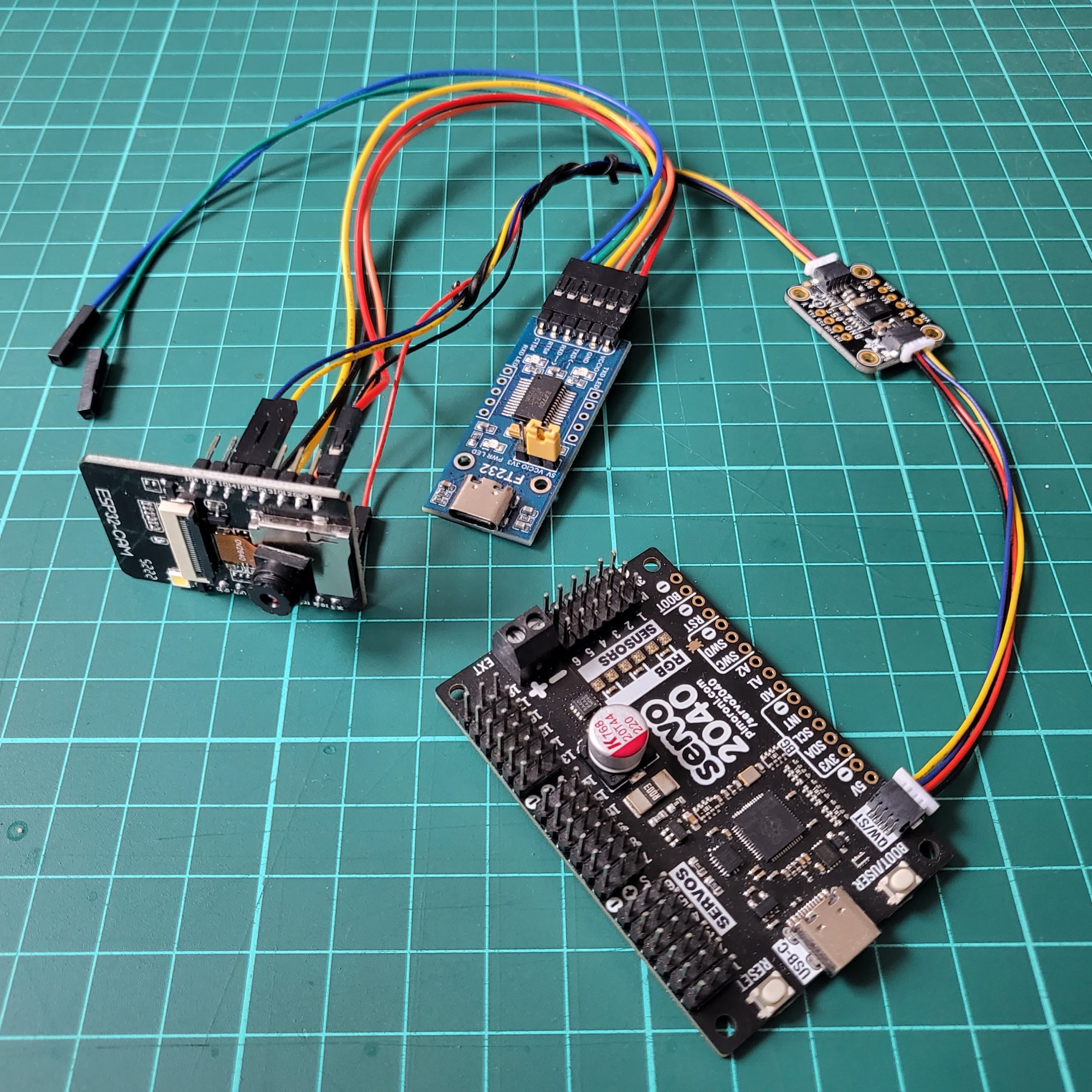
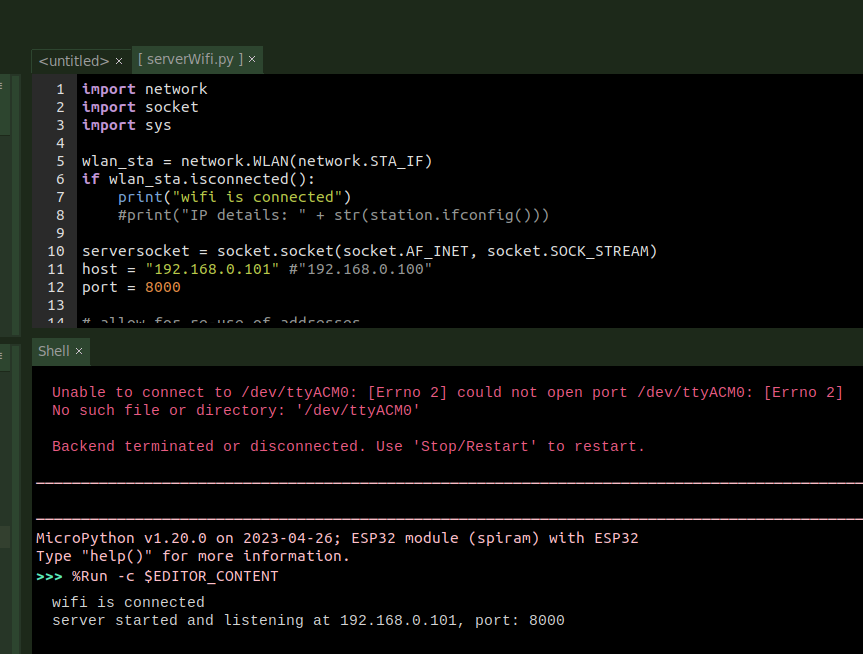
ESP32 Cam, IMU and Servo 2040 connected
For Kayra, it’s necessary to go untethered. This video shows the fist successful connection from PC to ESP32 Cam (running in Micropython) via Wifi to IMU (BNO055, I2C slave) to the Raspberry Pi Pico based Pimoroni 2040 Servo Controller (as I2C slave). I enter a number on the PC transmitted via Wifi to the ESP32…