Okay, a lot happened since the last roadmap review, let’s check out what’s been done (turned green):

There have been investments along the power management (battery & step down converter), making Kayra wireless (all the ESP investements), let her display and stream video (firmwares on github), finally, there was a new walk cycle to let her walk with the whole body in built up.
Time to remove the green achievement post-its and add new ones! It becomes clear that the movement / walk cycle needs to be improved, this has two investment areas:
- improving the design of many parts for less wobble
- the second is on the algorithms.
We need to introduce Inverse Kinematics to better think about movements of important parts (feet / hip) instead of all parts (8 servo angles for the two feet).
For this, it may be important to enter simulations, first investments in MuJoCo have been done already. Once Kayra can be simulated, this again has two important consequences:
- people can work on Kayra without hardware investment
- learnings about movements can be iterated faster upon
A prime example for fast iteration is Reinforcement Learning, where hundreds of thousands of iterations are done automatically to learn what movements bring the body forward without falling.
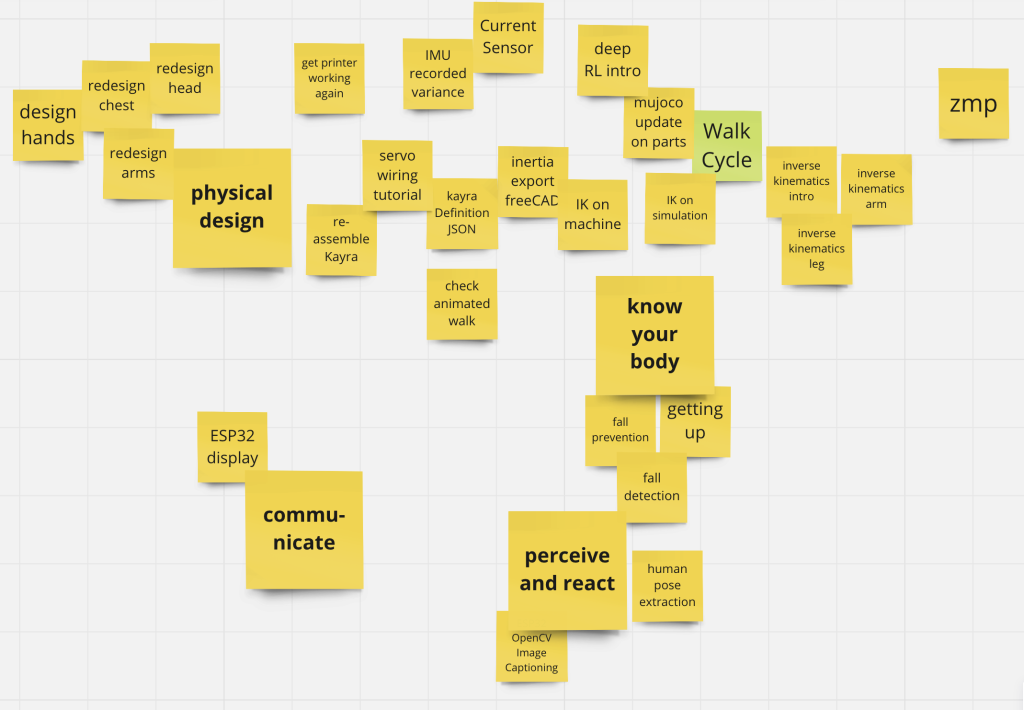
So here’s the updated roadmap:
Leave a Reply