
Kayra: an open-source, easy to modify, 3D-printable humanoid



-
Kayra is getting an IMU
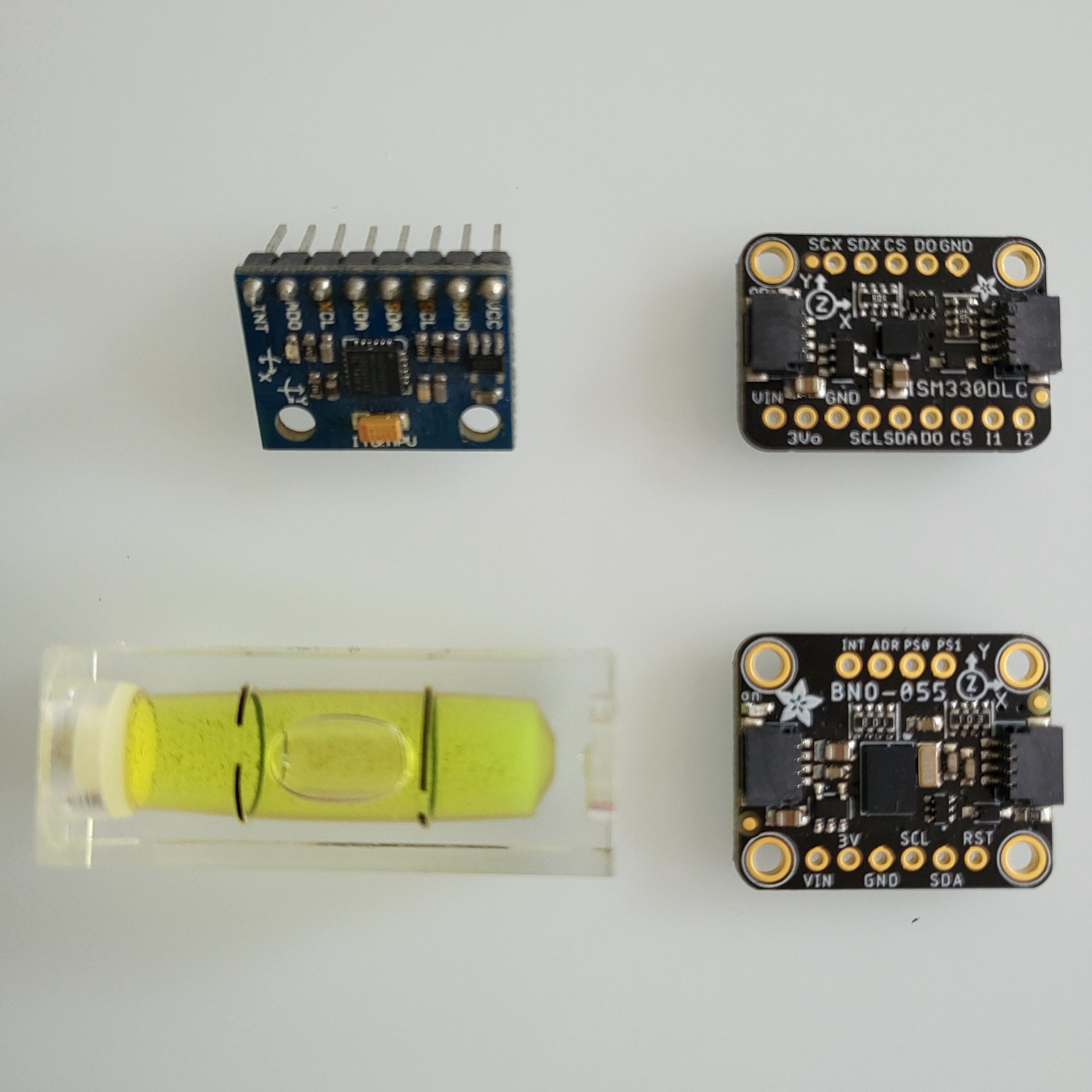
To get away from simple static gait, Kayra needs to be able to register Yaw, Roll, Pitch angles in space. This is what IMUs are made for, they also measure movements along these axes (hence 6 DoF, Degrees of Freedom, three axes and the rotation along these) as well as relations to magnetic field (9…
-
Bearing for the Foot
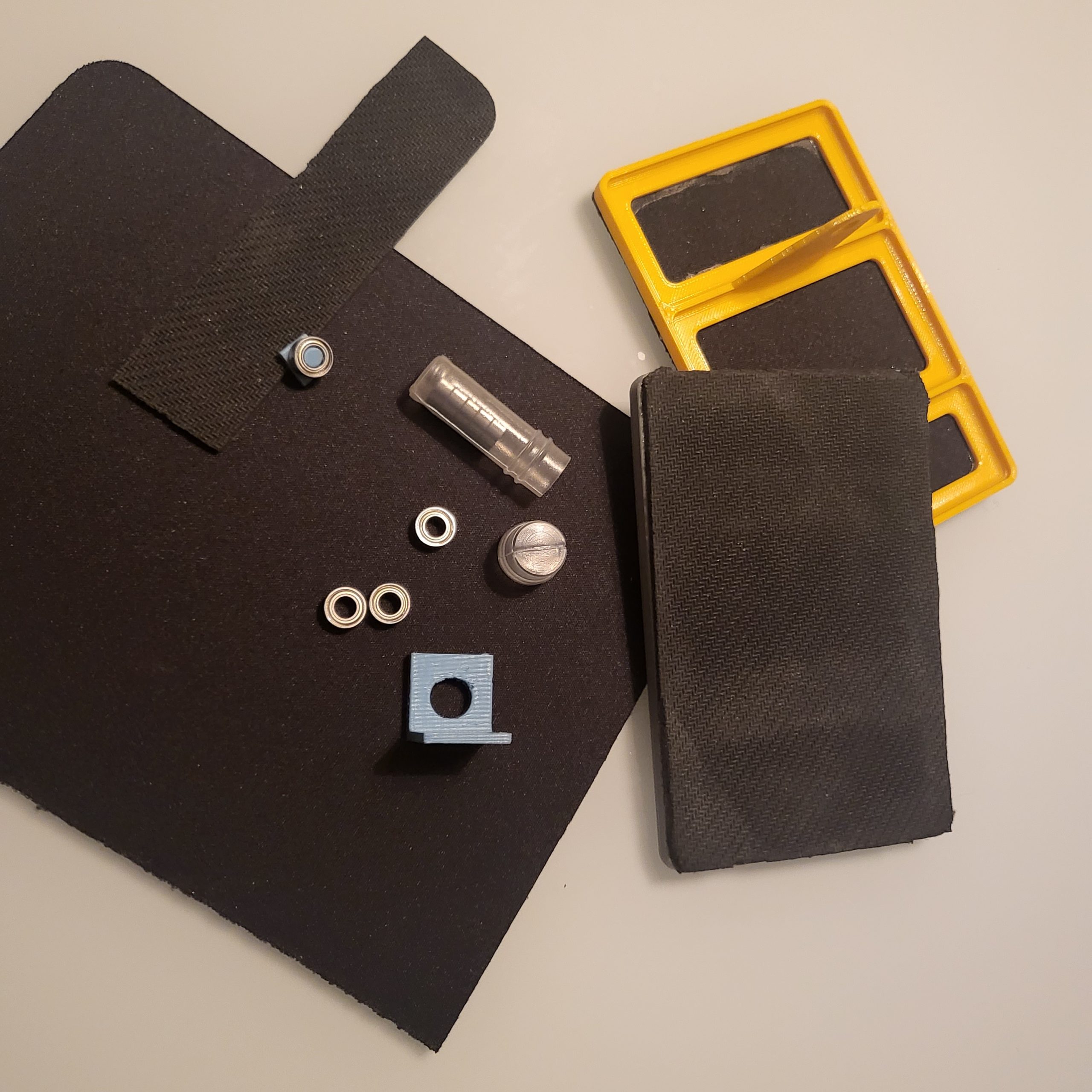
The instable walks from Kayra when controller and battery were added was also due to the wobble and wiggle in the foot and hip joints. So, it was necessary to add bearings to these.
-
Simulating Kayra
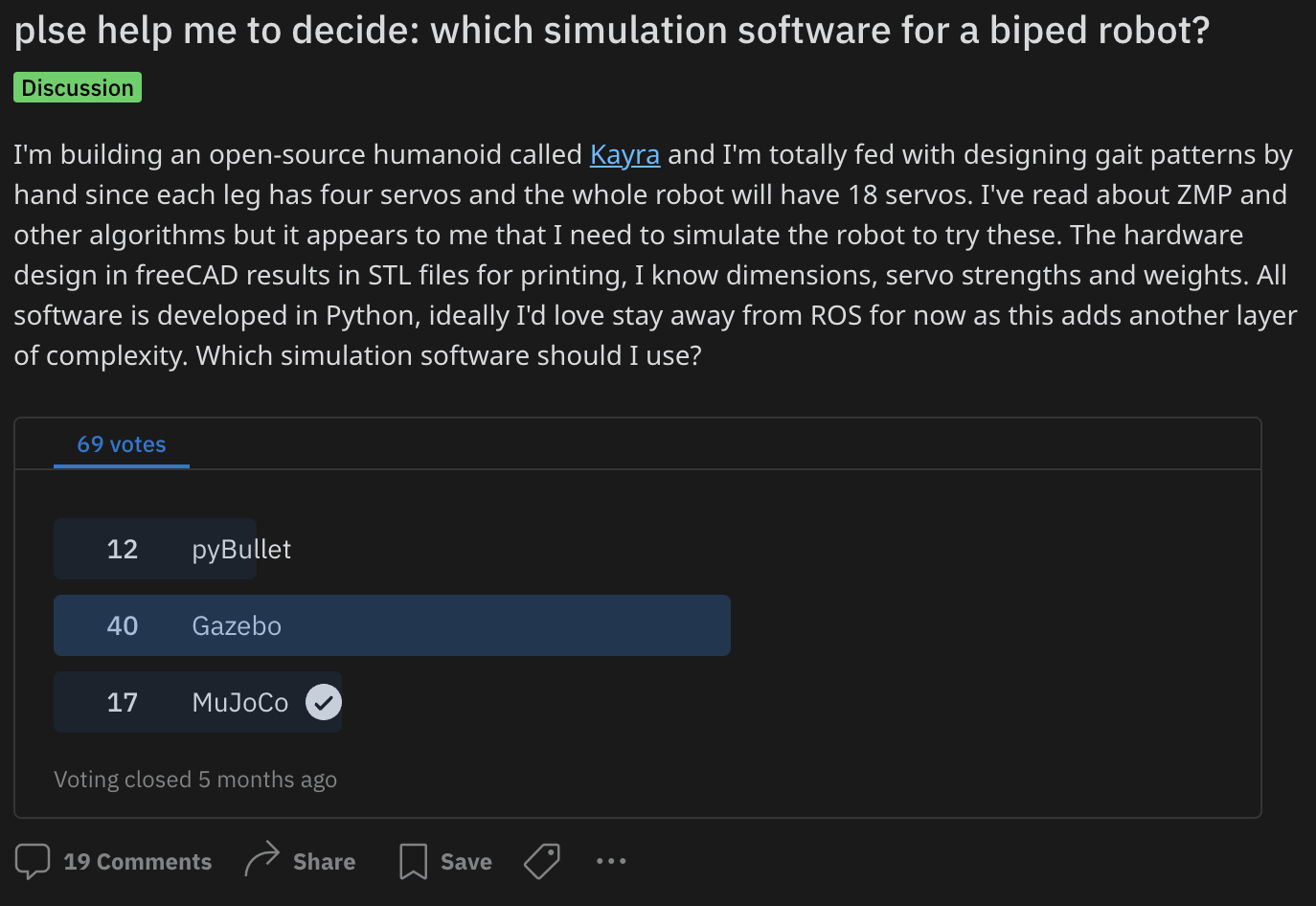
At some point in time, it will be necessary to work with a digital twin of Kayra to simulate all sorts of movements, weight distribution and possibly power. Also during the design process it would speed up the fitting of two parts. I asked the reddit community about which software to use: pyBullet is a…
-
Kayra’s very first walk!
That was a lot of work to understand the initial poses and the animation needed, but here it is! Of course, there is a lot to improve, especially the feet are slipping on the plastic mat. But what’s really cool is that the steps are really long, so it’s not the conventional half-foot steps that…
-
Kayra’s Controller Software
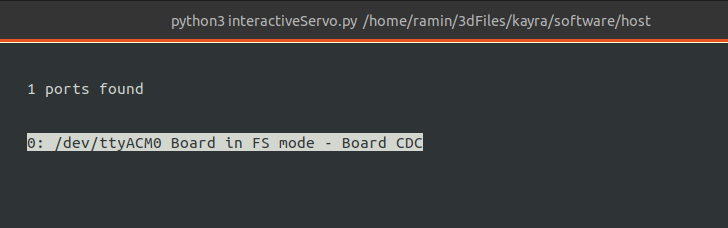
I assume that you have cloned / downloaded the Kayra’s github archive that contains all 3D files and software. In the software directory, you will find the directories /host and /robot. The former is for the PC (Linux) and the latter is for the robot. Within /robot, you’ll find /body, /head, /sensors and /tools You…
-
Setting up the Controller and Thonny
Introduction Kayra will start with the Pimoroni Servo Controller because this controller is based on the Raspberry Pi Pico 2040 chip running Micropython. The intention was to keep the complexity of the programming languages for Kayra low. Ideally, hobbyists and students only need the knowledge of Python and can work on all levels with Kayra: …
-
Ankle & Foot!
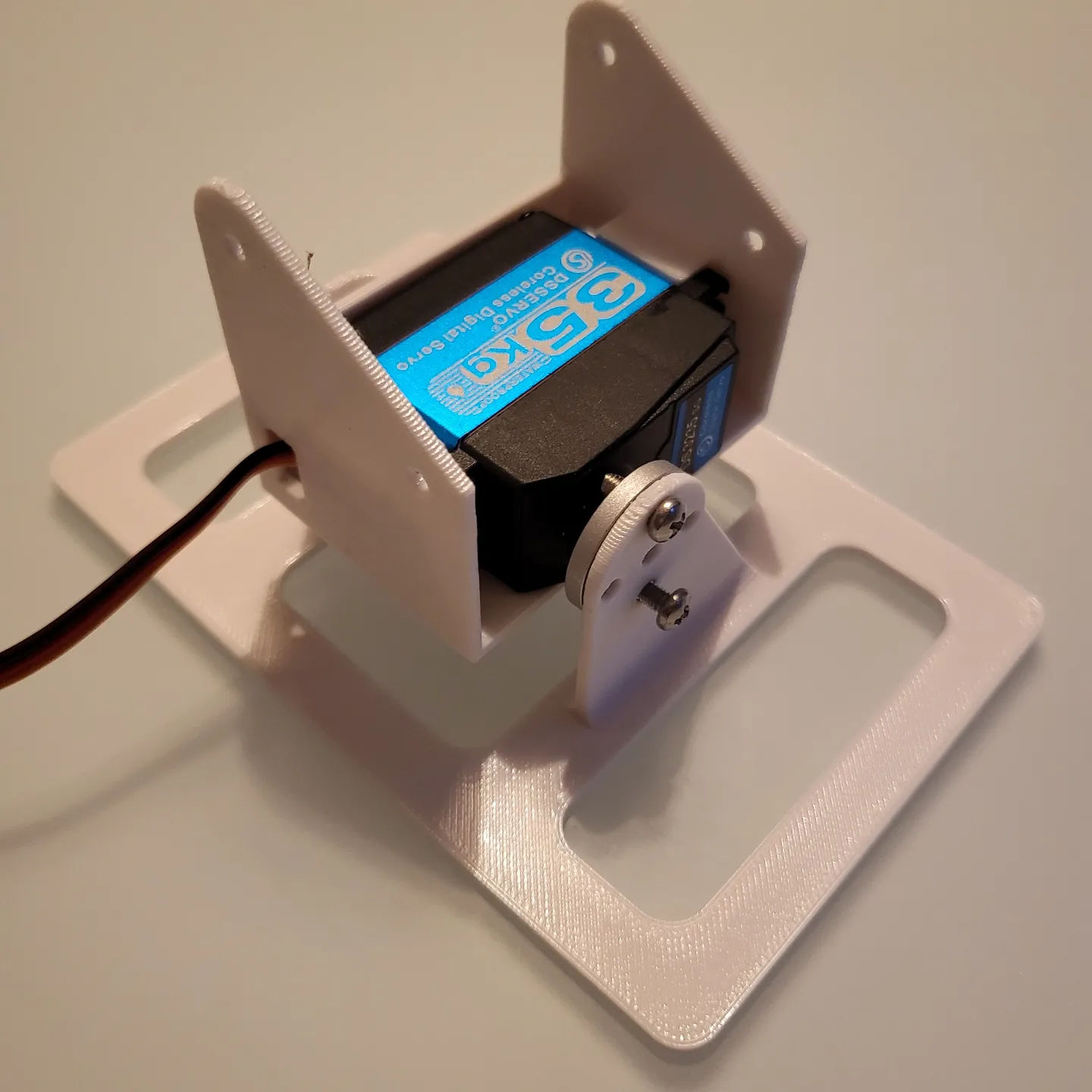
To understand spatial relationships between parts, I try to sketch them on my notebook first. Finally, I went over to design it in freeCAD and do the first prints. It’s handy to have the dimensions of the servo and the servo disk in one spreadsheet in freeCAD to modify them when needed.
Improvement suggestions for the website?