Category: Design Progress
-
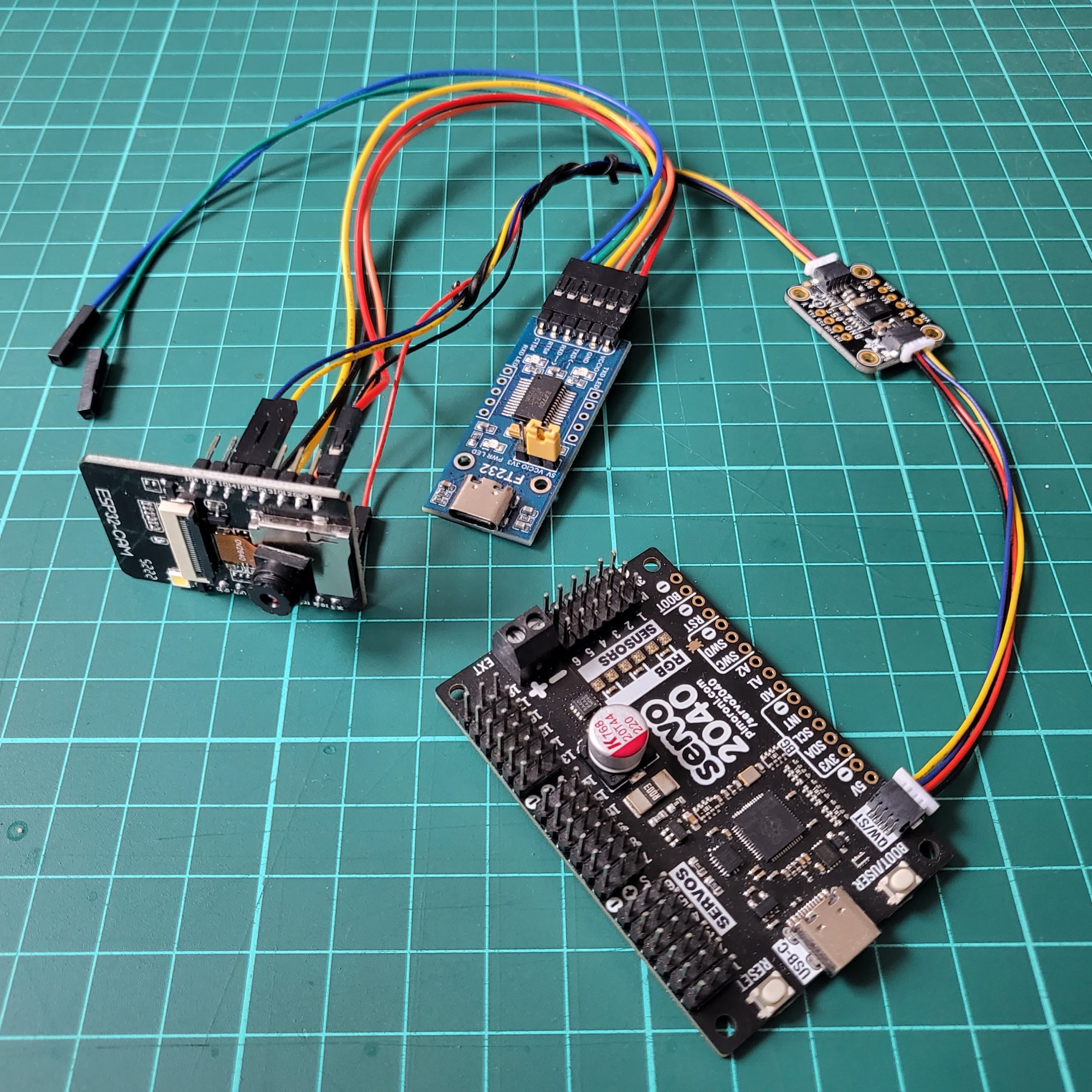
ESP32 Cam, IMU and Servo 2040 connected
For Kayra, it’s necessary to go untethered. This video shows the fist successful connection from PC to ESP32 Cam (running in Micropython) via Wifi to IMU (BNO055, I2C slave) to the Raspberry Pi Pico based Pimoroni 2040 Servo Controller (as I2C slave). I enter a number on the PC transmitted via Wifi to the ESP32…
-
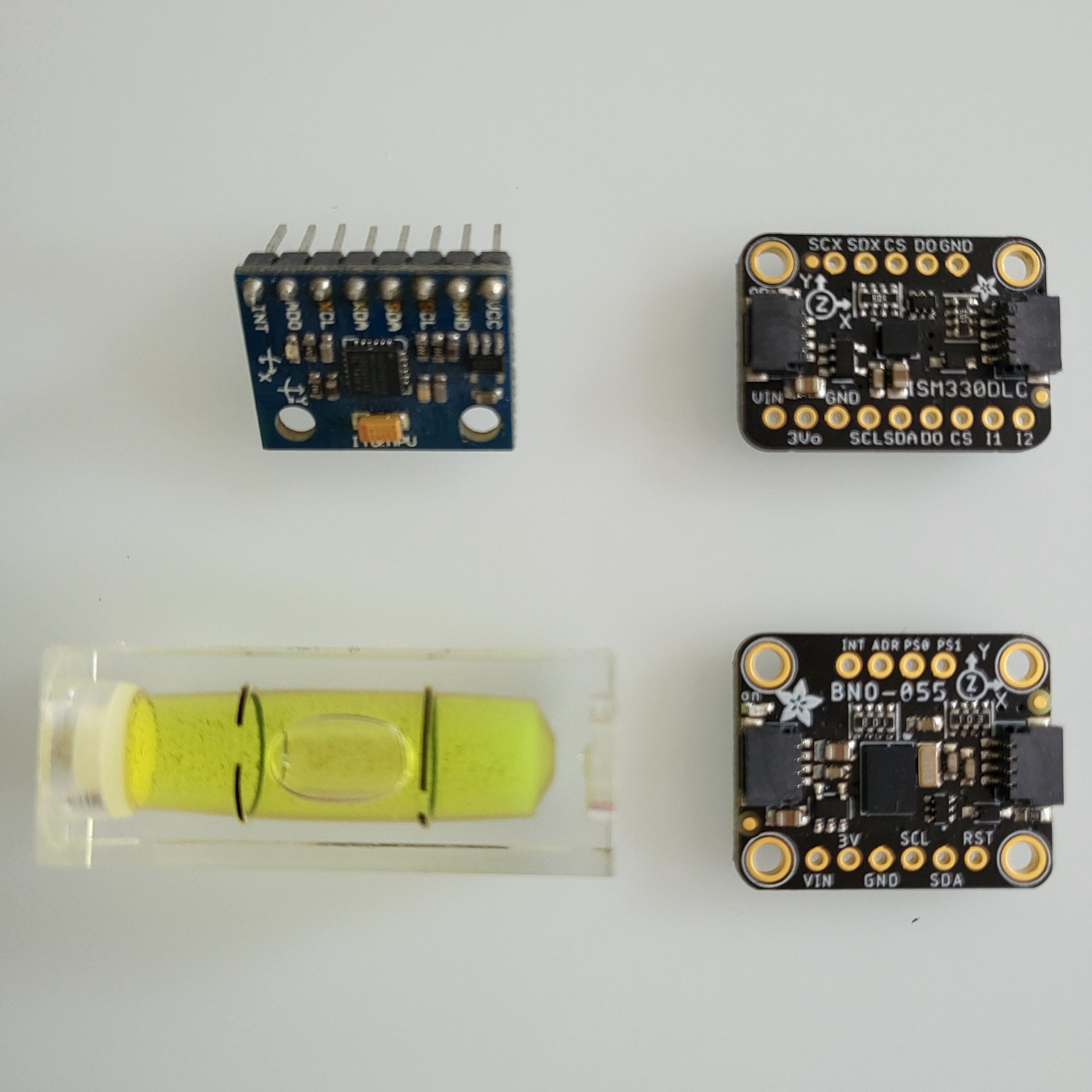
Kayra is getting an IMU
To get away from simple static gait, Kayra needs to be able to register Yaw, Roll, Pitch angles in space. This is what IMUs are made for, they also measure movements along these axes (hence 6 DoF, Degrees of Freedom, three axes and the rotation along these) as well as relations to magnetic field (9…