Category: Design Progress
-
Knee Design Evolution
Usually I’m designing from a “geometric requirements first” perspective to understand the relation of parts first, next I want to get the attachments stable so that screws etc really sit tight and won’t wobble. Finally, there’s the overall-system perspective: does the part in conjunction with the others and while the robot is moving the right…
-
Design Review of Kayra’s Head
I decided to do video reviews from time to time to document the thinking about how to design parts, understand their spatial relationships, the possibilities to print and assemble them, accessability for electronics and certainly the looks. So, here’s the first review. It’s about the neck mechanics, the electronics holder in the head and the…
-
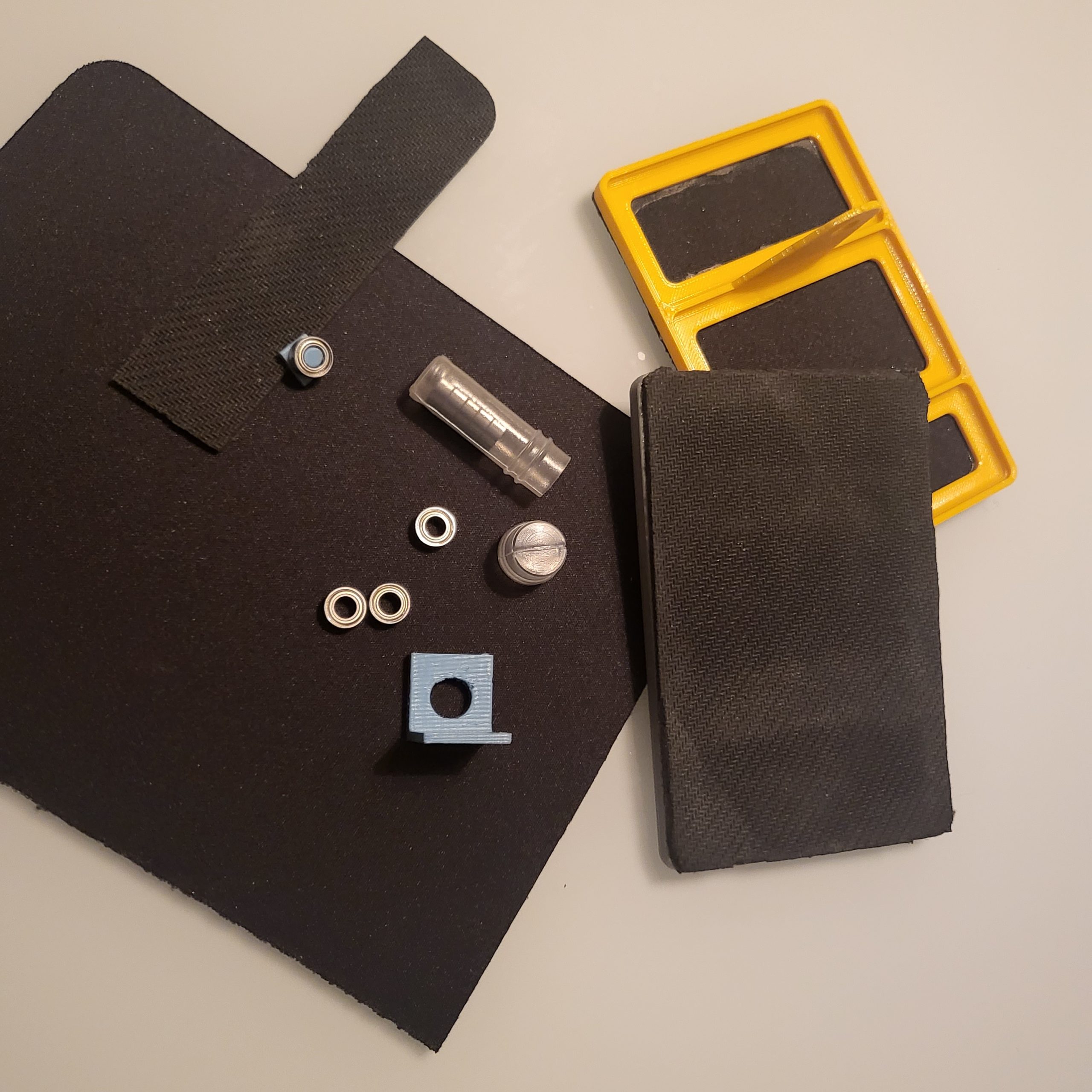
Bearing for the Foot
The instable walks from Kayra when controller and battery were added was also due to the wobble and wiggle in the foot and hip joints. So, it was necessary to add bearings to these.
-
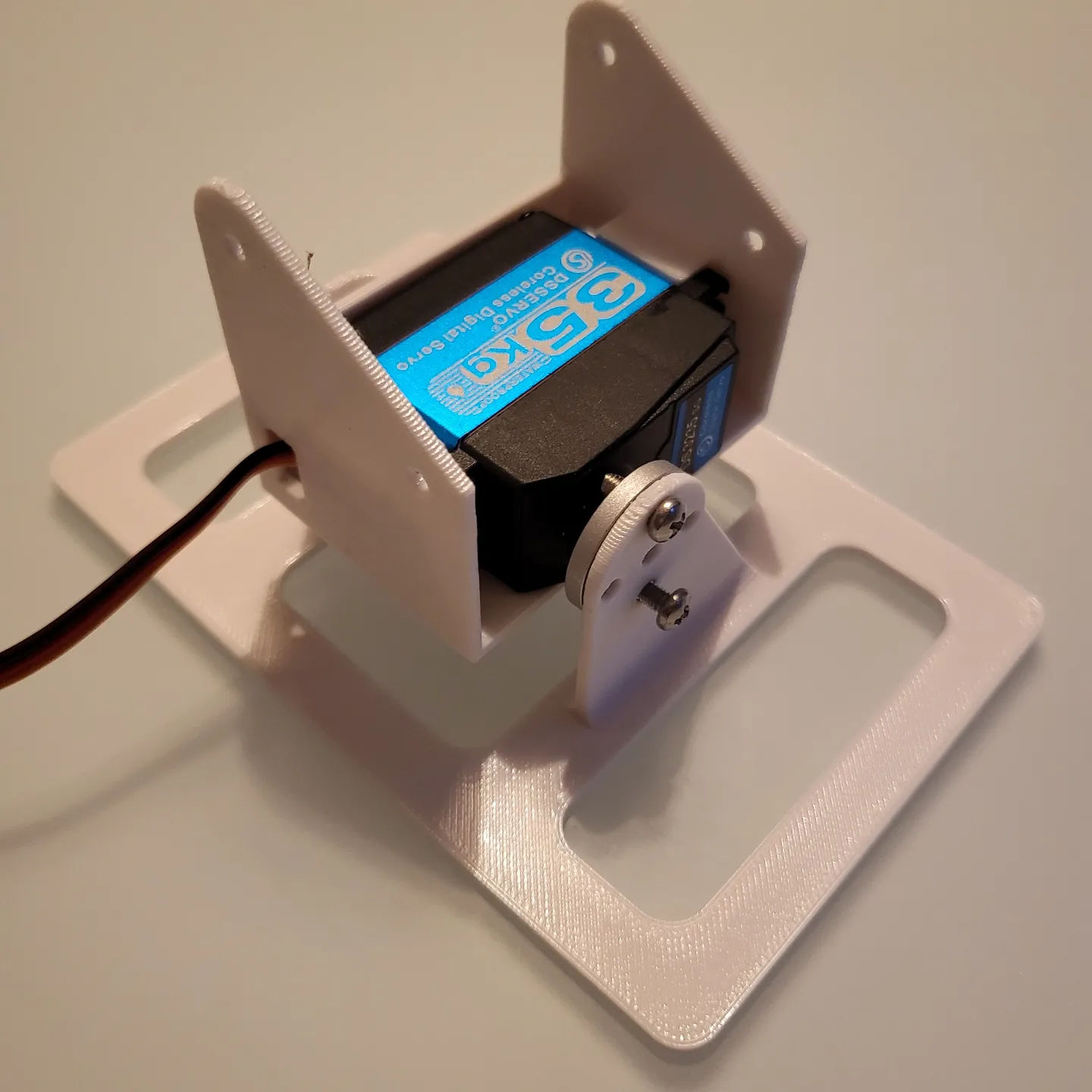
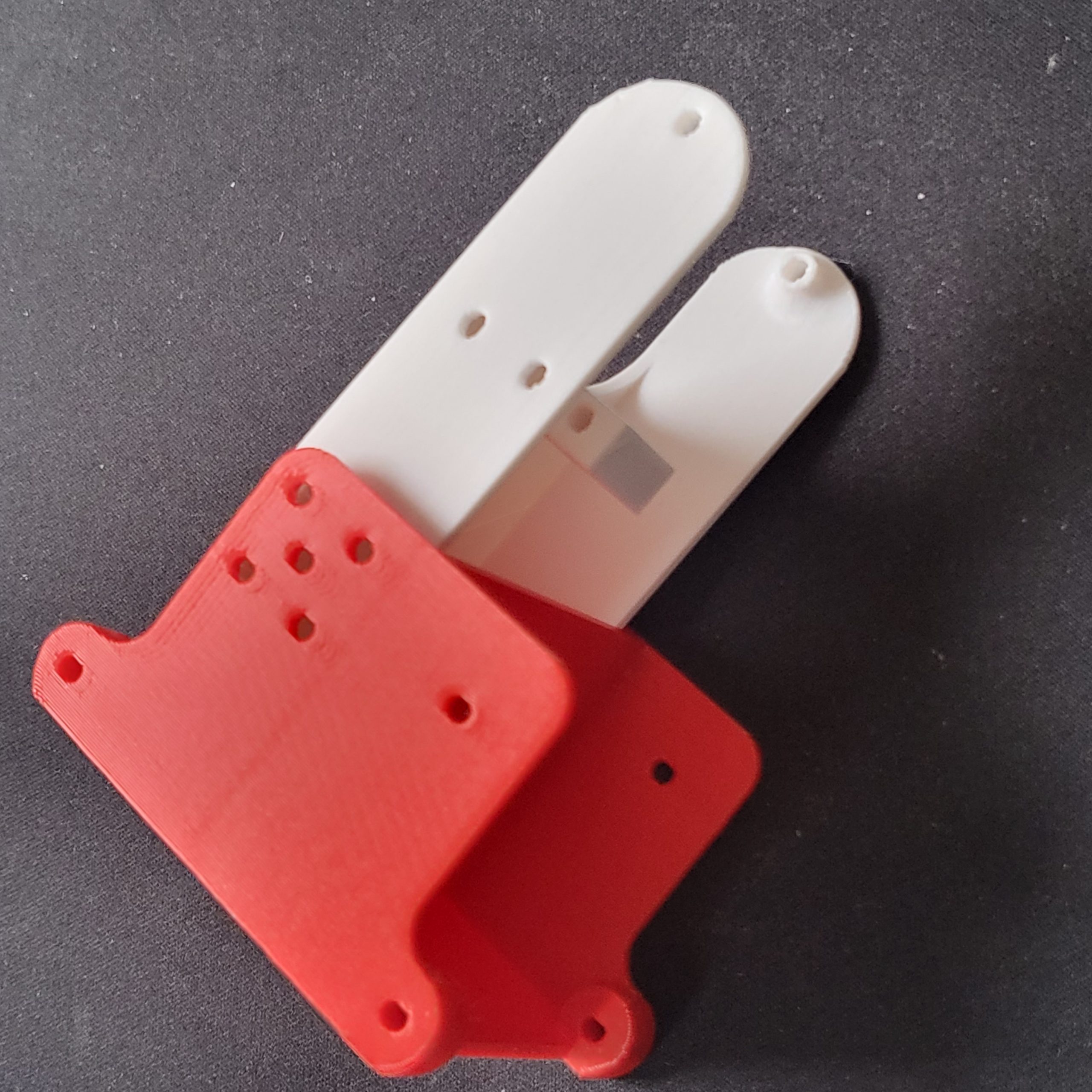
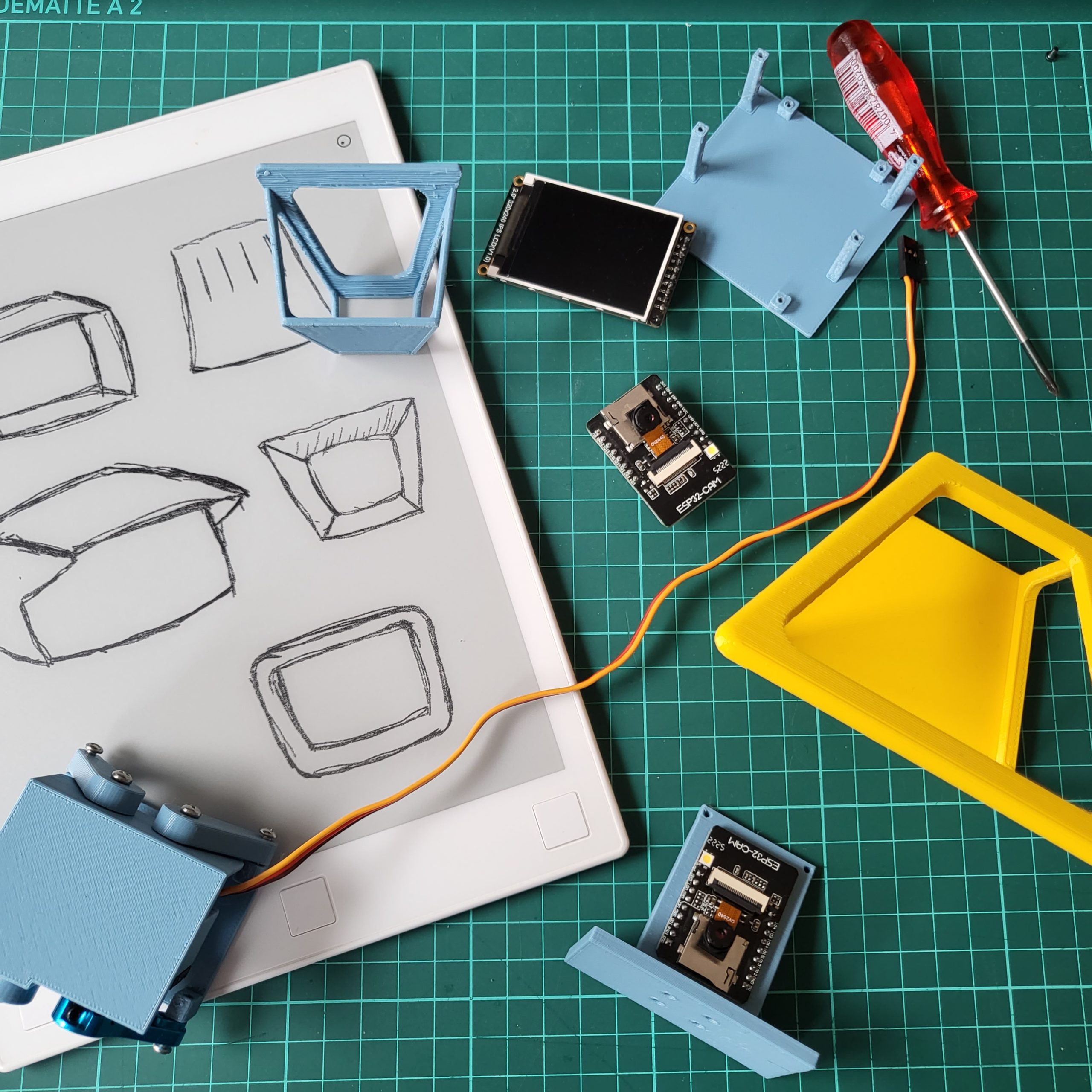
Ankle & Foot!
To understand spatial relationships between parts, I try to sketch them on my notebook first. Finally, I went over to design it in freeCAD and do the first prints. It’s handy to have the dimensions of the servo and the servo disk in one spreadsheet in freeCAD to modify them when needed.